Le Laboratoire Tencent Robotics X et l'équipe Hunyuan ont conjointement publié et open-sourcé un modèle multimodal large pour le déploiement de tâches incarnées—HY-Embodied-0.5-X.
Le modèle a obtenu des classements de 6 premières places et 3 deuxièmes places dans 10 évaluations de benchmark couvrant la planification, le raisonnement spatial, le QA incarné, la référence visuelle et la compréhension des trajectoires.
Malgré le fait de n'avoir que 2 milliards de paramètres, le modèle surpasse des modèles plus grands comme Claude-4.0-Sonnet et GPT-5.4 dans les tâches d'opération à long terme.
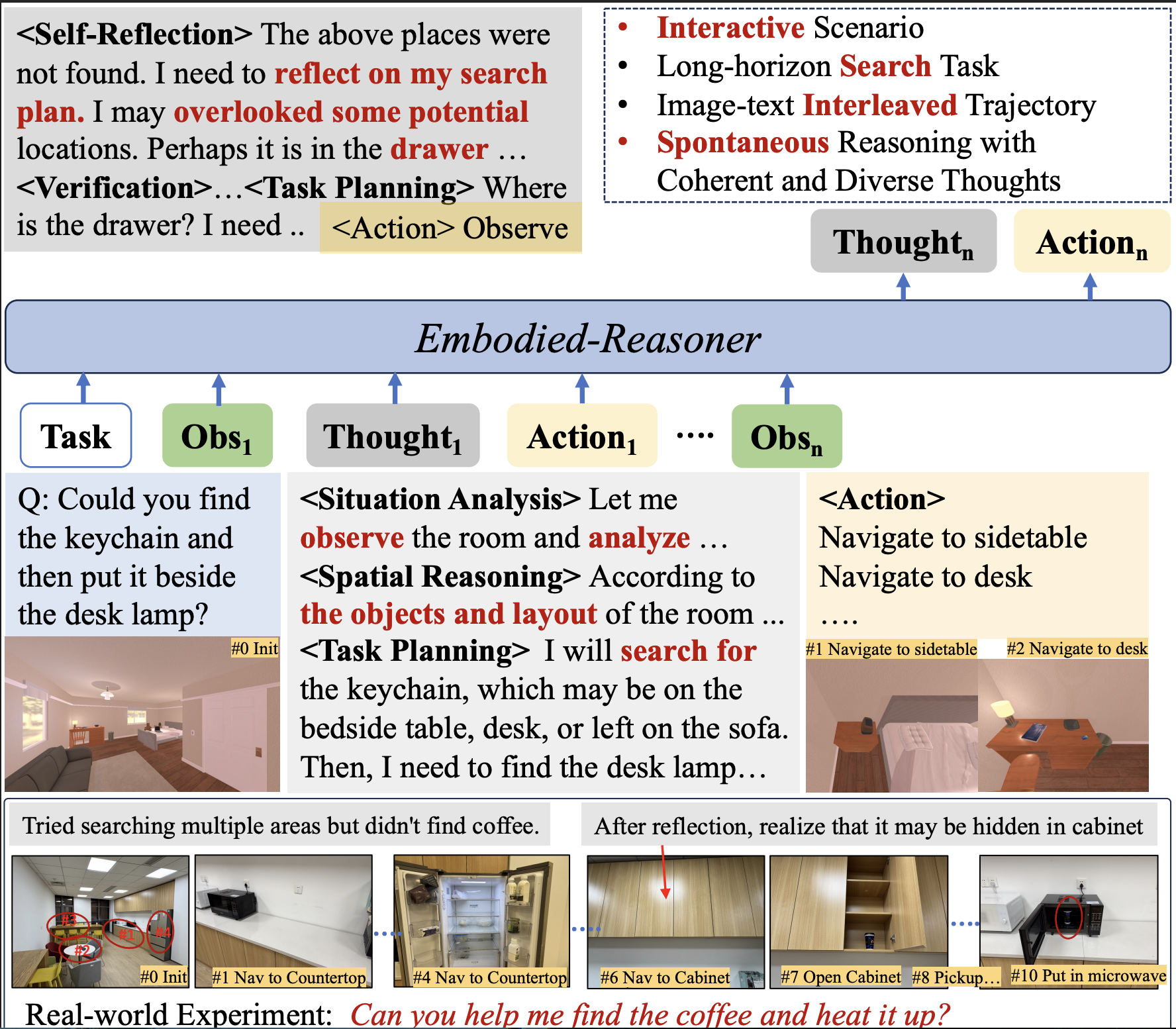
Le modèle peut générer une planification complète pour des tâches et s'ajuster pendant l'exécution basée sur les retours environnementaux, implémentant une boucle ReAct avec des capacités de re-planification rapide.
Liens Open Source: