El Laboratorio Tencent Robotics X y el equipo Hunyuan publicaron conjuntamente y abrieron el código de un modelo multimodal grande para despliegue de tareas embodied—HY-Embodied-0.5-X.
El modelo logró posiciones de 6 primeros lugares y 3 segundos lugares en 10 evaluaciones de benchmark cubriendo planificación, razonamiento espacial, QA embodied, referencia visual y comprensión de trayectorias.
A pesar de tener solo 2 mil millones de parámetros, el modelo supera a modelos más grandes como Claude-4.0-Sonnet y GPT-5.4 en tareas de operación de largo horizonte.
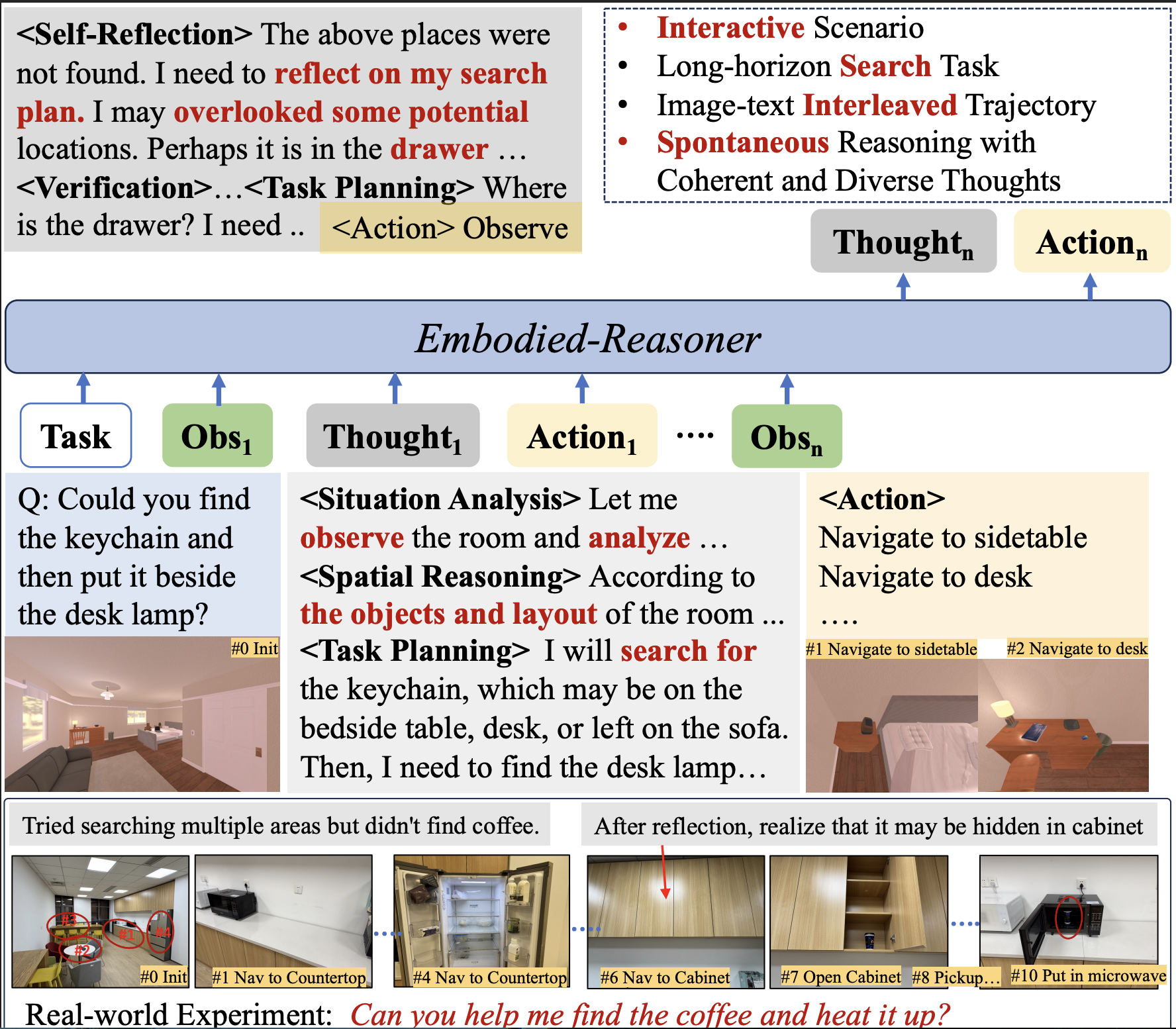
El modelo puede generar planificación completa para tareas y ajustarse durante la ejecución basándose en retroalimentación ambiental, implementando un bucle ReAct con capacidades de re-planificación rápida.
Enlaces de Código Abierto: